FOCUS ONTIアラート
進化するファクトリ・オートメーション
2017.4.27 3:57 pm

以前、ロボット工学に関する記事で、ロボットの種類とそれぞれの特長について論じました。以下はその要約です。
産業用ロボット:通常、位置が固定され、同じ作業を正確に繰り返せるように設計されています。ロボット・アームの基礎部分かその隣に設置されたロボット・コントローラで制御されています。
協調型ロボット:人間とやり取りするように設計された産業用ロボットの一つのサブ・グループです。安全に人と協調できるよう、多数のセンサを搭載しており、人間やモノとの衝突を避けるために自動的に動作を止めるようにできています。
物流ロボット:倉庫や工場の限られた場所の中で使われることが多く、その中で一つの場所から別の場所へモノを運びます。これを行うために、ロボットは位置検出やマッピング作成のためのセンサや周囲を検出するためのセンサなどを備えています。物流ロボットは、バッテリを電源とするので、使用可能な電力バジェットの適切な管理が必要です。
サービス・ロボット:一般的に家庭で使われます。サービス・ロボットの典型的な事例としては、電気掃除機や電動芝刈り機が挙げられます。物流ロボットと同様、サービス・ロボットもまた、位置の検出やマッピング作成にセンサを必要とします。しかし、ロボットのサイズ上、安全性の概念はやや希薄になっています。

他にもドローンあるいは外科手術を支援する医療ロボットのようなロボットがありますが、産業用ロボットがいまだにロボット市場の主流となっています。図2で示すような先進的な製造ラインは、多数の産業用ロボットやコンベア・ベルト、センサ、カメラ、光バリヤ、スキャナなどの多くのコンポーネントで構成され、しかもこれらはお互いにやり取りしています。人間もまた、同じ環境で働いており、機械を点検したり、外観検査を行ったりしています。

全てのシステムをスムーズに協調させて動作させることは、単に重要なだけではありません。もし組立ラインの中央にある1台の機械が故障して、他の機械が動作し続けたとしたら、どうなるのか想像してみてください。ダウンタイムを最小にすることもコスト的に重要です。高速で正確、効率的で安全な製造技術を確立するため、最新のロボットシステムは通信、モータ制御、センシングという3つを軸にする必要があります。
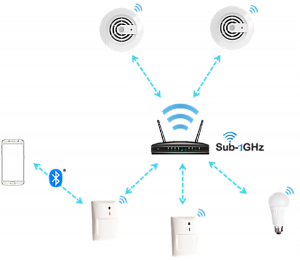
通信
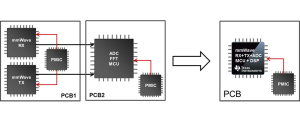
通信は、通信そのものを含むだけではなく、信号処理も含みます。典型的な信号ループは、産業用イーサネットを使って位置データを軸制御装置に転送するロボット・コントローラの中に設置されるメイン・コンピュータ装置から構成されます。そして、ロボット・アームの中でモータを制御します。1台のリゾルバがその結果となる位置を検出します。そのデータはその後、RS-485インターフェイスを通して、メインのコンピュータ装置に送られ、そこで位置を再度チェックし、必要ならば、追加の位置修正データを軸制御装置に送ります。このシナリオでは、さまざまな物理層で、多数の通信プロトコルを使うため、高い信頼性のみならず、フレキシブルな処理装置も必要になります。多数の産業用プロトコルをサポートするプロセッサの好例は、TIの『AM335x Sitara™』プロセッサです。このプロセッサ・ファミリを使えば、ユーザーは一般的な産業用イーサネット・プロトコルを実行するだけではなくユーザー独自のプロトコルも実行できます。
モータ制御
モータ制御は、何本のロボットの軸や何個のモータを同時に制御できるかだけではなく、どれほど高効率でこれを実行できるかを意味します。電源管理はシステにおいて常に重要です。しかし、効率の悪い電源や、スイッチング損失の大きなFET(電界効果トランジスタ)によって生じた熱を扱うことは、スペースが限られたエリアでは大問題になります。例えば、ロボットの制御筐体の中に置かれたインバータや、ロボット・アーム自身の中に置かれたスイッチが、協調型ロボットの場合によく見られます。この問題を解決するため、TIはコントローラだけではなく、GaN(窒化ガリウム)モジュールも提供しています。そしてこれらは、通常のシリコン・ベースのFETと比べ、スイッチング損失を大きく減らします。
センシング
一般的に、センシング技術という言葉は幅広い意味を持ちます。産業用ロボットの場合、センシングは温度や電流のセンサのようにかなり単純なデバイスから、3軸ToF (Time-of-Flight)カメラのような複雑なシステムまでを指します。また、協調型ロボットでは、近接センサ技術がその周囲にいる人がいることを検知して、ロボット・アームが未知の物体にぶつかったり、あるいはぶつかる前に安全に停止させたり、止めたりもっと改善したりすることが重要になります。TIは、超音波センサやフラックスゲート、レーダー、3D-ToFのような近接センサなどのさまざまな先端センシング技術に対応するさまざまなデバイスを提供しています。
TIが提供する通信、モータ制御、センシングのソリューションの詳細は、こちらのホワイト・ペーパーおよび「TI ロボティクス概要」をご覧ください。
※Sitara はTexas Instruments Incorporatedの商標です。その他すべての商標および登録商標はそれぞれの所有者に帰属します。
※上記の記事はこちらのBlog記事(2017年4月17日)より翻訳転載されました。
・お問い合わせ先
日本テキサス・インスツルメンツ株式会社
E2E 日本語コミュニティ(http://e2e.ti.com/group/jp/)